Merih KARAAĞAÇ
Merih, 5 yıldır teknoloji alanında editörlük yapıyor. Bilim, yapay zeka, donanim ve mobil teknolojiler konusundaki yazıları düzenliyor. Bilim ve yapay zeka konularında uzmanlaşmış.
Purdue Üniversitesi öğrencisi Aaed Musa, halat tahrik sistemi kullanan ve 12 motora sahip CARA robot köpeğini yaratarak robot teknolojisinde devrim niteliğinde bir adım attı.


Purdue Üniversitesi makine mühendisliği öğrencisi Aaed Musa, robot teknolojilerine olan ilgisini, halat tahrik sistemiyle çalışan ve 12 motora sahip bir robot köpek olan CARA ile pekiştirdi. CARA, özel olarak tasarlanmış 3D yazıcı parçaları ve zeki kodlama sayesinde oldukça dinamik ve gerçekçi hareketler sergiliyor.
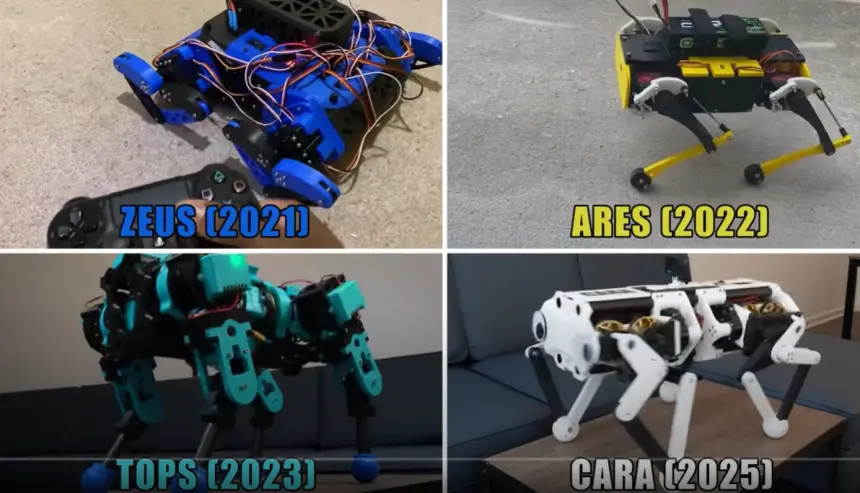
Musa, CARA’yı tasarlarken halat tahrik sistemini, özellikle de "ırgat tahrik sistemi"ni kullandı. Bu tahrik sistemi, dişli kullanmadan hareketi aktarmak için halatlar ve pürüzsüz tamburlar kullanıyor. Musa, "Capstanlar Gerçekten Harika" olarak adlandırdığı bu tahrik sisteminin, robot köpek için sıfır boşluk, yüksek tork şeffaflığı, düşük maliyet ve sessiz çalışma gibi avantajlar sunduğunu belirtiyor. CARA, önceki robotları ZEUS, ARES ve TOPS’tan sonra Musa’nın en gelişmiş robotu olma özelliği taşıyor.
CARA’nın yapımında, yüksek mukavemetli ve esnemeyen halatlar (Dyneema DM20) kullanıldı. Ayrıca robotun bacakları, her biri için üçer adet olmak üzere toplamda 12 motorla donatıldı. Bu motorlar, drone teknolojisinde kullanılan büyük çaplı, düşük hızlı fırçasız "pankek" motorları olup, her motorun konum, hız ve tork kontrolü akıllı aktüatörler sayesinde sağlanıyor. Robotun beynini ise Teensy 4.1 mikrodenetleyicisi kontrol ediyor.
CARA’nın hareketleri, Ters Kinematik (IK) adı verilen bir teknikle optimize ediliyor. Bu yazılım, robotun her ayağını 3D uzayda hassas bir şekilde konumlandırarak, dengeyi sağlıyor ve her iki bacağın yerde kalmasını sağlayan bir koşu yürüyüşü oluşturuyor. Musa, robotun adımlarının yörüngelerini test ederek en iyi yolu buldu ve bunun sonucunda sikloid yolun en verimli olduğunu keşfetti. Bu hareket yolu, gerçek bir köpeğin patisinin eğrisini taklit ediyor.
Musa, CARA’yı test ederken bazı parçaların kırıldığını fark etti ve bu da onu tasarımda iyileştirmelere yönlendirdi. Özellikle zayıf parçaları daha kalın ve dayanıklı malzemelerle yeniden tasarladı ve robotun hızını ve adım boyutlarını optimize ederek stresin azaltılmasını sağladı.
Musa, CARA'nın geleceği için de planlar yapıyor. Bu robot için tekerlekler ve sırt montajları gibi eklemeler planlanıyor. Ayrıca, GoPro kamera, LiDAR sensörü veya bir robotik kol gibi özelliklerin de eklenmesi düşünülüyor. Ayrıca Musa, "CARA’nın daha küçük ve üretici dostu bir versiyonunu yapmayı düşünüyorum. Bu sürüm, adım adım bir yapım kılavuzuyla birlikte 2026’da hayata geçecek." dedi.
CARA, sadece teknik olarak değil, aynı zamanda yaratıcı tasarımıyla da dikkatleri üzerine çekiyor. Hem robot teknolojilerini ilerletiyor hem de gelecekteki robotik projelere ilham veriyor.

Merih, 5 yıldır teknoloji alanında editörlük yapıyor. Bilim, yapay zeka, donanim ve mobil teknolojiler konusundaki yazıları düzenliyor. Bilim ve yapay zeka konularında uzmanlaşmış.
E-posta adresiniz yayınlanmayacaktır. Zorunlu alanlar * ile işaretlenmiştir.